S. GUPTA, P. ARBELAEZ AND J. MALIK
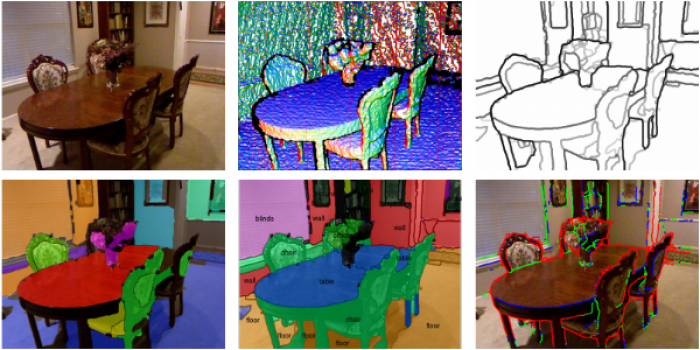
We address the problems of contour detection, bottom-up grouping and semantic segmentation using RGB-D data. We focus on the challenging setting of cluttered indoor scenes, and evaluate our approach on the recently introduced NYU-Depth V2 (NYUD2) dataset [27]. We propose algorithms for object boundary detection and hierarchical segmentation that generalize the gPb-ucm approach of [2] by making effective use of depth information. We show that our system can label each contour with its type (depth, normal or albedo). We also propose a generic method for long-range amodal completion of surfaces and show its effectiveness in grouping. We then turn to the problem of semantic segmentation and propose a simple approach that classifies super pixels into the 40 dominant object categories in NYUD2. We use both generic and class-specific features to encode the appearance and geometry of objects. We also show how our approach can be used for scene classification, and how this contextual information in turn improves object recognition. In all of these tasks, we report significant improvements over the state-of-the-art.