Abstract
Results
Table 1. Comparison against the state-of-the-art on the EndoVis 2017 dataset.
| METHOD | D | T |
|---|---|---|
| TernausNet [28] MF-TAPNet [15] ISINet (Ours) | ✓ | |
| ISINet (Ours) | ✓ ✓ | ✓ |
| CHALLENGE IOU | MEAN CLASS IOU |
|---|---|
| 35.27 37.35 53.55 55.62 | 10.17 10.77 26.92 28.96 |
| 66.27 67.74 | 36.48 38.08 |
Table 2. Comparison against the state-of-the-art on the EndoVis 2018 dataset.
| METHOD | D | T |
|---|---|---|
| TernausNet [28] MF-TAPNet [15] ISINet (Ours) | ✓ | |
| ISINet (Ours) | ✓ ✓ | ✓ |
| CHALLENGE IOU | MEAN CLASS IOU |
|---|---|
| 46.22 67.87 72.99 73.03 | 14.19 24.68 40.16 40.21 |
| 77.19 77.47 | 44.58 45.29 |
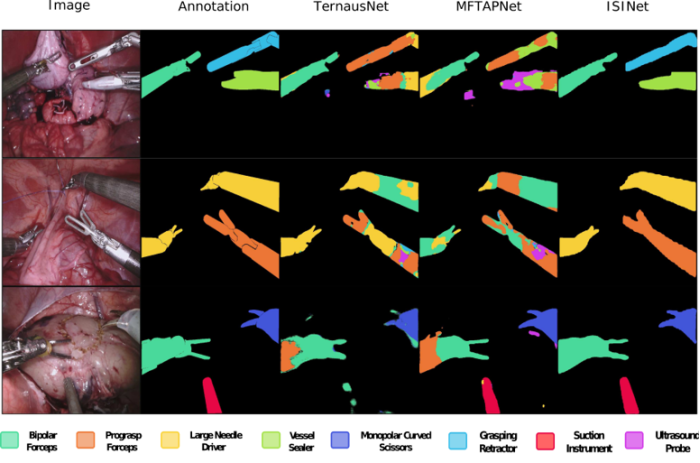
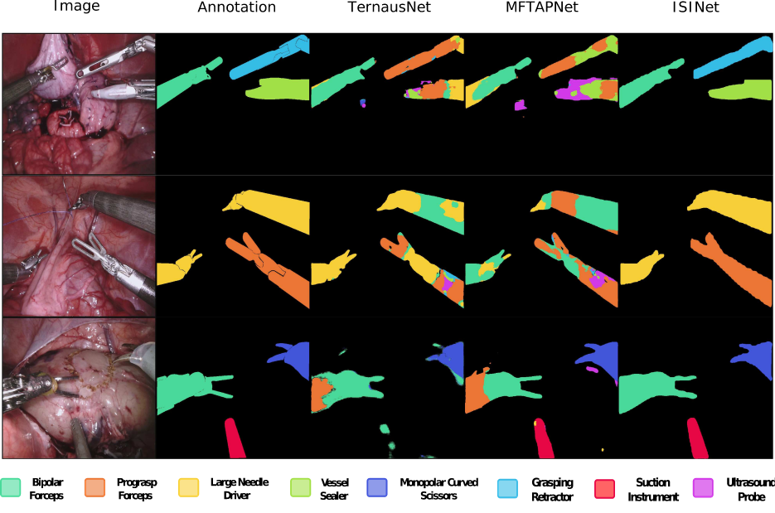
Qualitative results
Downloads
References
[1] Allan, M., Shvets, A., Kurmann, T., Zhang, Z., Duggal, R., Su, Y.H., et al.:2017 robotic instrument segmentation challenge. arXiv preprint arXiv:1902.06426(2019)
[2] Allan, M., Shvets, A., Kurmann, T., Zhang, Z., Duggal, R., Su, Y.H., et al.: 2017 robotic instrument segmentation challenge. arXiv preprint arXiv:1902.06426 (2019)
[15] Jin, Y., Cheng, K., Dou, Q., Heng, P.A.: Incorporating temporal prior from motion flow for instrument segmentation in minimally invasive surgery video. In: Medical Image Computing and Computer Assisted Intervention – MICCAI 2019. pp. 440–448. Springer International Publishing, Cham (2019)
[28] Shvets, A.A., Rakhlin, A., Kalinin, A.A., Iglovikov, V.I.: Automatic instrument segmentation in robot-assisted surgery using deep learning