Skip to main content
Home
People-old
Research
Global Health
Computer Vision
Sustainability
Publications
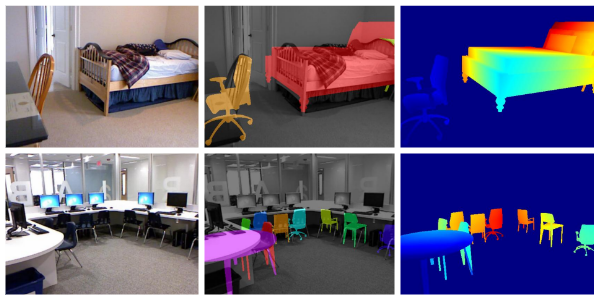
ALIGNING 3D MODELS TO RGB-D IMAGES OF CLUTTERED SCENES
Home
Research Publications
ALIGNING 3D MODELS TO RGB-D IMAGES OF CLUTTERED SCENES
Abstract